- English
- Español
- Português
- русский
- Français
- 日本語
- Deutsch
- tiếng Việt
- Italiano
- Nederlands
- ภาษาไทย
- Polski
- 한국어
- Svenska
- magyar
- Malay
- বাংলা ভাষার
- Dansk
- Suomi
- हिन्दी
- Pilipino
- Türkçe
- Gaeilge
- العربية
- Indonesia
- Norsk
- تمل
- český
- ελληνικά
- український
- Javanese
- فارسی
- தமிழ்
- తెలుగు
- नेपाली
- Burmese
- български
- ລາວ
- Latine
- Қазақша
- Euskal
- Azərbaycan
- Slovenský jazyk
- Македонски
- Lietuvos
- Eesti Keel
- Română
- Slovenski
- मराठी
- Srpski језик

Стаття, щоб зрозуміти різницю між кроковими двигунами та сервоприводами та серводвигунами
I. Відмінності між кроковими двигунами та сервоприводами та серводвигунами
Кроковий двигун: це електричний імпульсний сигнал у кутове зміщення або зміщення лінії частин крокового двигуна елемента керування без контуру. Простіше кажучи, він покладається на електричний імпульсний сигнал для контролю кута та кількості обертів. Тому він покладається лише на імпульсний сигнал, щоб визначити, скільки обертів. Оскільки датчика немає, кут зупинки може відхилятися. Однак точний імпульсний сигнал мінімізує відхилення.
Серводвигун: покладайтеся на схему керування сервоприводом для керування швидкістю двигуна, через датчик для контролю положення обертання. Тому контроль положення дуже точний. І швидкість обертання також змінна.
Сервопривод (електронний сервопривод): основним компонентом сервоприводу є серводвигун. Він містить схему керування серводвигуном + набір редукторів. О так, серводвигун не має редуктора. А сервопривід має редуктор.
У випадку граничного сервоприводу він покладається на потенціометр під вихідним валом для визначення кута повороту важеля керма. Керування сигналом сервоприводу є сигналом з широтно-імпульсною модуляцією (ШІМ), де мікроконтролер може легко генерувати цей сигнал.
II. Принцип дії крокового двигуна
Як це працює:
Зазвичай ротор двигуна є постійним магнітом, і коли струм протікає через обмотки статора, обмотки статора створюють векторне магнітне поле. Це магнітне поле змушує ротор повертатися на певний кут, так що напрямок пари магнітних полів ротора буде таким же, як напрямок магнітного поля статора. При векторі магнітного поля статор повертається на кут. Ротор також обертається на кут з цим магнітним полем. Для кожного вхідного електричного імпульсу двигун обертається на один кутовий крок вперед. Його вихідний кутовий переміщення пропорційний числу вхідних імпульсів, а його швидкість обертання пропорційна частоті імпульсів. Змінюючи порядок подачі напруги на обмотки, двигун реверсує. Таким чином, кількість і частота імпульсів і порядок живлення обмоток кожної фази двигуна можна контролювати для управління обертанням крокового двигуна.
Принцип утворення тепла:
Зазвичай зустрічаються всі типи двигунів, всередині яких є залізний сердечник і котушка обмотки. Опір обмотки, потужність призведуть до втрат, величина втрат і опір, а струм пропорційні квадрату, що часто називають втратою міді, якщо струм не є стандартним постійним струмом або синусоїдою, також буде створено втрати гармоній; ядро має гістерезисний ефект вихрового струму, у змінному магнітному полі також вироблятиме втрати, пов’язані з розміром матеріалу, струмом, частотою, напругою, що називається втратою заліза. Втрати міді та заліза виявлятимуться у формі виділення тепла, таким чином впливаючи на ефективність двигуна. Кроковий двигун, як правило, переслідує точність позиціонування та вихідний крутний момент, ефективність відносно низька, струм, як правило, більший, а гармонічні складові високі, частота струму змінюється зі швидкістю та зміною, тому крокові двигуни зазвичай мають нагрівання, і ситуація є більш серйозною, ніж звичайний двигун змінного струму.
III. Конструкція керма
Сервопривід в основному складається з корпусу, друкованої плати, приводного двигуна, редуктора та елемента визначення положення. Його принцип роботи полягає в тому, що приймач надсилає сигнал до сервоприводу, а мікросхема на друкованій платі змушує двигун без сердечника почати обертатися, а потужність передається на поворотний важіль через редуктор, і в той же час детектор положення надсилає сигнал назад, щоб визначити, чи досяг він позиціонування чи ні. Детектор положення насправді є змінним резистором. Коли сервопривід обертається, значення резистора змінюється відповідно, і кут повороту можна дізнатися, визначивши значення резистора. Загальний серводвигун - це тонкий мідний дріт, обмотаний навколо триполюсного ротора, коли струм протікає через котушку, створює магнітне поле, а периферія магніту ротора створює відштовхування, яке, у свою чергу, створює силу обертання. Відповідно до фізики, момент інерції об’єкта прямо пропорційний його масі, тому чим більша маса об’єкта, який потрібно обертати, тим більша сила потрібна. Щоб досягти швидкої швидкості обертання та низького енергоспоживання, сервопривід виготовлено з тонких мідних дротів, скручених у дуже тонкий порожнистий циліндр, утворюючи дуже легкий порожнистий ротор без полюсів, а магніти розміщені всередині циліндра, який є двигуном із порожнистою чашкою.
Щоб відповідати різним робочим середовищам, існують сервоприводи з водонепроникною та пилонепроникною конструкцією; і у відповідь на різні вимоги до навантаження існують пластикові та металеві шестерні для сервоприводів, а металеві шестерні для сервоприводів, як правило, мають високий крутний момент і високу швидкість, з перевагою в тому, що шестерні не будуть сколюватися через надмірне навантаження. Сервоприводи вищого класу будуть оснащені кульковими підшипниками, щоб зробити обертання швидшим і точнішим. Існує різниця між одним кульковим підшипником і двома кульковими підшипниками, звичайно, два кулькові підшипники кращі. Нові сервоприводи FET в основному використовують FET (польовий транзистор), перевагою якого є низький внутрішній опір і, отже, менші втрати струму, ніж звичайні транзистори.
IV. Принцип роботи сервоприводу
Від хвилі ШІМ до внутрішньої схеми для генерації напруги зсуву, контакторний генератор через редуктор, щоб рухати потенціометр, так що коли різниця напруг дорівнює нулю, двигун зупиняється, щоб досягти ефекту сервоприводу.
Протоколи для ШІМ сервоприводів однакові, але найновіші сервоприводи можуть відрізнятися.
Загалом протокол: ширина високого рівня в 0,5 мс ~ 2,5 мс для керування сервоприводом для повороту під різними кутами.
V. Як працюють серводвигуни
На малюнку нижче показано схему керування серводвигуном, виконану за допомогою операційного підсилювача потужності LM675, а двигун є серводвигуном постійного струму. Як видно з малюнка, на операційний підсилювач потужності LM675 подається напруга 15 В, і напруга 15 В додається до синфазного входу операційного підсилювача LM675 через RP 1, а вихідна напруга LM675 додається до входу серводвигуна. Двигун оснащений генератором сигналів вимірювання швидкості для визначення швидкості двигуна в реальному часі. По суті, генератор сигналу швидкості є свого роду генератором, і його вихідна напруга пропорційна частоті обертання. Вихідна напруга від генератора сигналу G вимірювання швидкості повертається на інвертуючий вхід операційного підсилювача як сигнал помилки швидкості після схеми дільника напруги. Значення напруги, встановлене потенціометром керування швидкістю RP1, додається до синфазного входу операційного підсилювача після ділення напруги на R1.R2, що еквівалентно опорній напрузі.
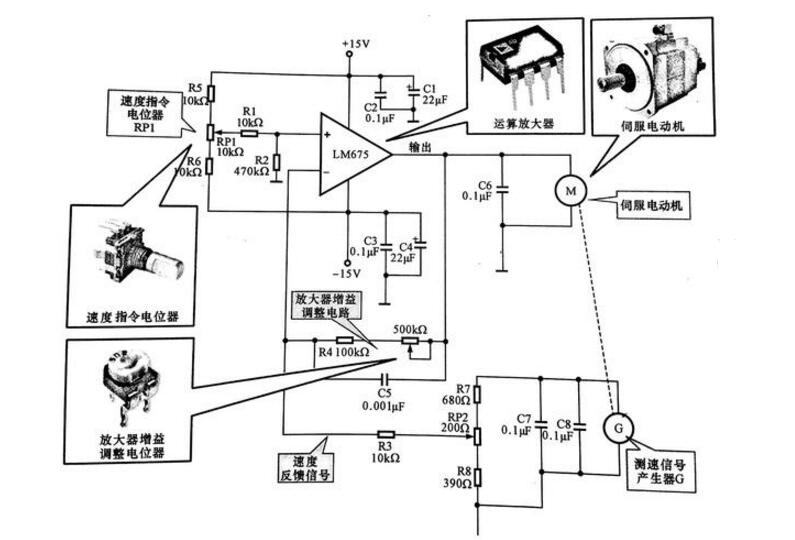
Схема керування серводвигуном
Серводвигун: Позначається літерою M для серводвигуна, це джерело живлення для системи приводу. Операційний підсилювач: позначається назвою схеми, тобто LM675, це частина підсилювача в схемі керування сервоприводом, яка забезпечує струм приводу для серводвигуна.
Потенціометр керування швидкістю RP1: встановлює опорну напругу операційного підсилювача в ланцюзі, тобто налаштування швидкості. Потенціометр регулювання підсилення підсилювача RP2: використовується в схемі для точного налаштування підсилення підсилювача та розміру сигналу зворотного зв’язку за швидкістю відповідно.
При зміні навантаження двигуна напруга, що подається на інвертований вхід операційного підсилювача, також змінюється, тобто при збільшенні навантаження двигуна швидкість зменшується, а вихідна напруга генератора сигналу швидкості також зменшується, так що напруга на інвертованому вході операційного підсилювача зменшується, а різниця між цією напругою та опорною напругою збільшується, а вихідна напруга операційного підсилювача зростає. Навпаки, коли навантаження стає меншим і швидкість двигуна збільшується, вихідна напруга генератора сигналу вимірювання швидкості зростає, напруга зворотного зв’язку, що додається до інвертованого входу операційного підсилювача, збільшується, різниця між цією напругою та опорною напругою зменшується, вихідна напруга операційного підсилювача зменшується, а швидкість двигуна відповідно зменшується, так що швидкість обертання може бути стабілізована на заданому значенні автоматично.